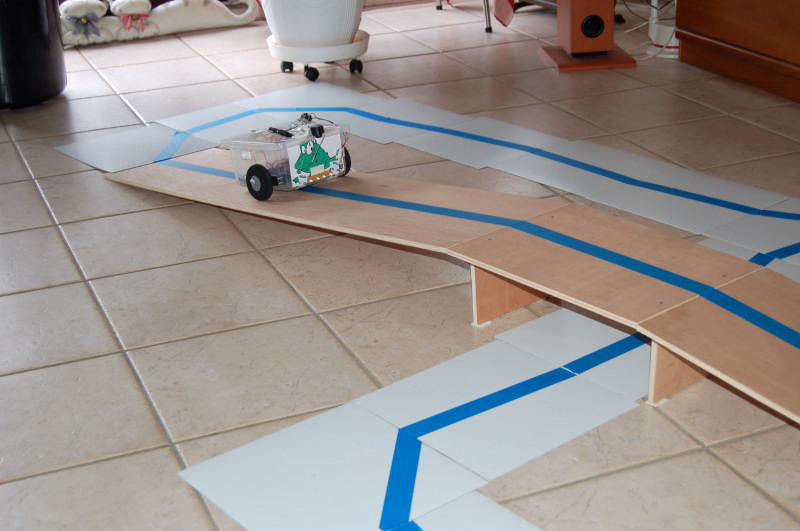
SUIVEUR de LIGNE
Minibot avec une camera video sans fil qui renvoie les images vers un PC.
Sur le PC un programme d'analyse d'image repére la position de la ligne bleue et la renvoie par radio au robot. Le robot corrige sa trajectoire pour se recentrer sur la ligne.